Zelfs als 's werelds meest geavanceerde insecten-micro-luchtvoertuig (MAV) wordt gebouwd, zal het uiteindelijk van weinig nut zijn als het niet stabiel kan landen. Dat is de reden waarom wetenschappers van de Harvard University hun RoboBee hebben ontworpen met een paar lange mugachtige poten, compleet met gewrichten.
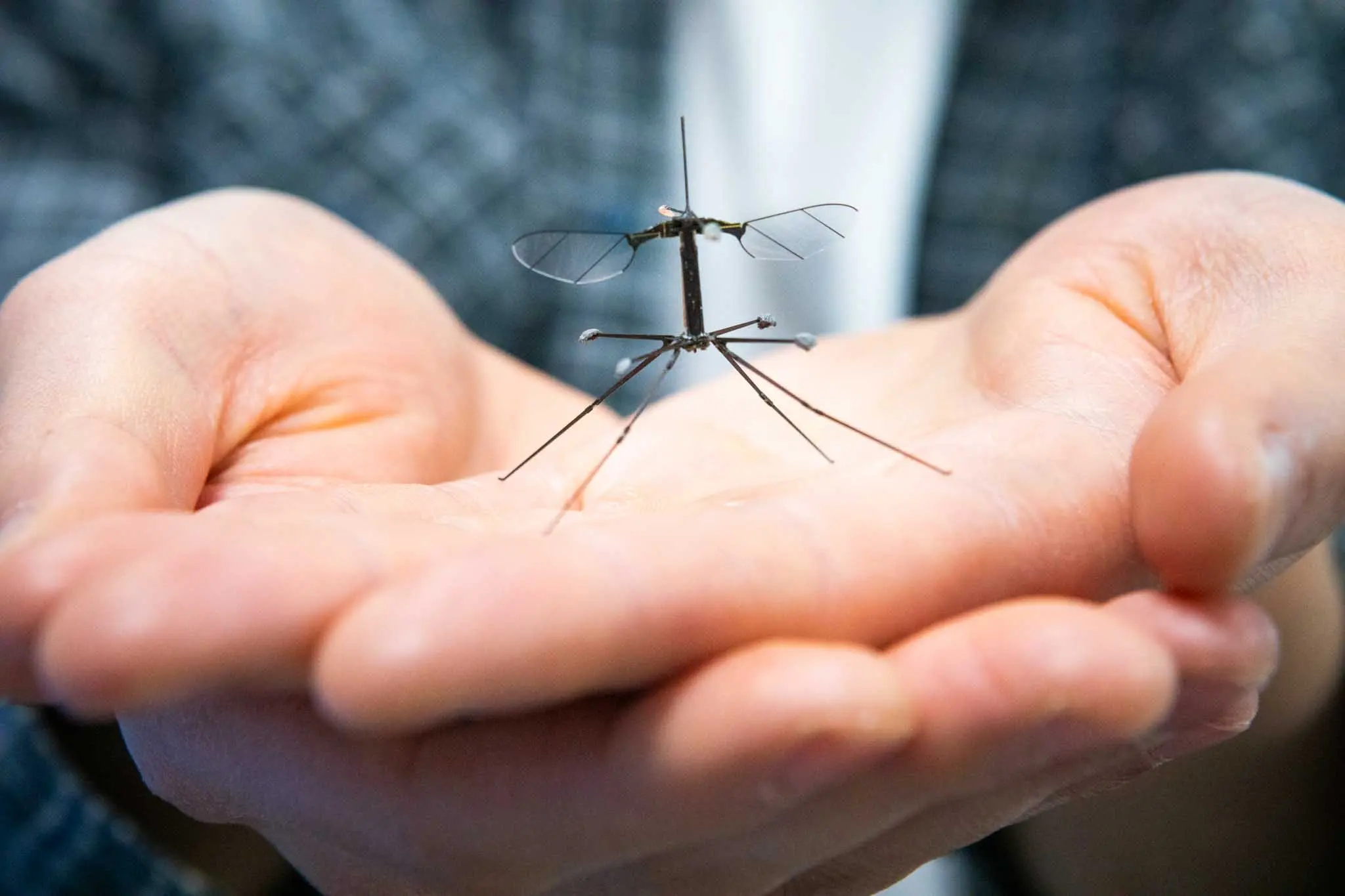
RoboBee heeft poten die muggen nabootsen - toekomstige versies kunnen worden gebruikt bij zoek- en reddingsoperaties of voor de bestuiving van gewassen
Voor degenen die niet bekend zijn met RoboBee: het is een op bijen geïnspireerde robot die vliegt door te klapperen met een paar kleine vleugels die zijn uitgerust met kunstmatige spieren. Hij heeft een spanwijdte van minder dan 3 centimeter (1,2 inch) en weegt slechts een tiende van een gram... hoewel hij via draden is verbonden met een stroombron en een microprocessor. Dat gezegd hebbende, kunnen toekomstige versies uiteindelijk volledig onafhankelijk draaien. Er bestaat zelfs al een versie op zonne-energie.
Terwijl andere versies van deze kleine robot hebben bewezen in staat te zijn tot manoeuvres zoals onderwatervluchten en bungelende stops, heeft het basismodel nooit goed gepresteerd bij het landen op vlakke (of andere) oppervlakken. Dit komt omdat de wervelingen die door de klapperende vleugels worden gecreëerd, luchtturbulentie kunnen veroorzaken wanneer ze door de grond worden tegengehouden, waardoor de robot zijn evenwicht verliest.
“Voorheen, als we zouden landen, zouden we het voertuig iets verder van de grond afzetten, laten vallen en bidden dat het rechtop en veilig zou landen”, zegt Christian Chan, een afgestudeerde ingenieur die leiding geeft aan het mechanische herontwerp van de robot.

Muggen staan bekend om hun vermogen om zacht te landen
De vier nieuwe poten van RoboBee, geïnspireerd op muggenpoten, zijn lang en flexibel genoeg zodat ze veilig contact kunnen maken met de grond voordat het lichaam van de robot wordt beïnvloed door turbulentie met grondeffect.
Bovendien helpen nieuwe besturingsalgoritmen de robot soepeler te laten landen, in plaats van hem ‘gewoon te laten vallen’.

Meervoudige belichting van RoboBee die opstijgt van het ene blad en op een ander blad landt met behulp van zijn nieuwe poten
“Het vinden van biologische inspiratie onder de grote verscheidenheid aan insecten biedt ons talloze manieren om robots te blijven verbeteren”, zegt Alyssa Hernandez, een postdoctoraal onderzoeker en co-auteur van het onderzoeksartikel. "Op onze beurt kunnen we deze robotplatforms gebruiken als hulpmiddelen voor biologisch onderzoek, waarbij we onderzoeken uitvoeren die biomechanische hypothesen testen."
Het artikel werd onlangs gepubliceerd in het tijdschrift Science Robotics. In de onderstaande video kun je zien hoe de RoboBee de landingsbeweging van een langpootmuis nabootst.
Bron: Harvard John A. Paulson School of Engineering and Applied Sciences