Een team van de Universiteit van Florida heeft onlangs aangekondigd dat ze een nieuw onderwatercommunicatiesysteem hebben ontwikkeld, BlueME genaamd, dat naar verwachting een revolutie teweeg zal brengen in de manier waarop autonome onderwaterrobots met elkaar en met mensen aan de oppervlakte communiceren. De onderzoekers zeiden dat deze technologie voortkwam uit hun jarenlange onderzoek naar draadloze implanteerbare apparaten in het lichaam. Het idee is om de ervaring van elektromagnetische voortplanting in de ‘lichte zoutwateromgeving’ van het menselijk lichaam over te dragen naar een soortgelijk medium als de oceaan.
Momenteel hebben traditionele onderwatercommunicatiemethoden hun eigen beperkingen. Radiogolven hebben weinig nut onder water, waar reguliere draadloze signalen in zout water met ongeveer 1 tot 10 decibel per meter worden verzwakt, vaak over een afstand van slechts enkele meters. Hoewel akoestische communicatie transmissie over langere afstanden kan bewerkstelligen, zal deze worden beïnvloed door factoren zoals Doppler-frequentieverschuiving en multipath-interferentie, en kan deze ook geluidsschade aan het leven in zee veroorzaken. Optische systemen hebben onder ideale omstandigheden een extreem hoge bandbreedte, maar vereisen een directe zichtlijn. Zodra het water troebel is of het optische venster is aangetast door biologische adhesie, zullen de prestaties aanzienlijk afnemen. Alles bij elkaar kunnen de meeste onderwaterrobots nu alleen maar zeer korte status-"hartslagpakketten" verzenden, of ze moeten regelmatig naar boven komen om missiegegevens te uploaden, wat hun realtime autonomiemogelijkheden ernstig beperkt.
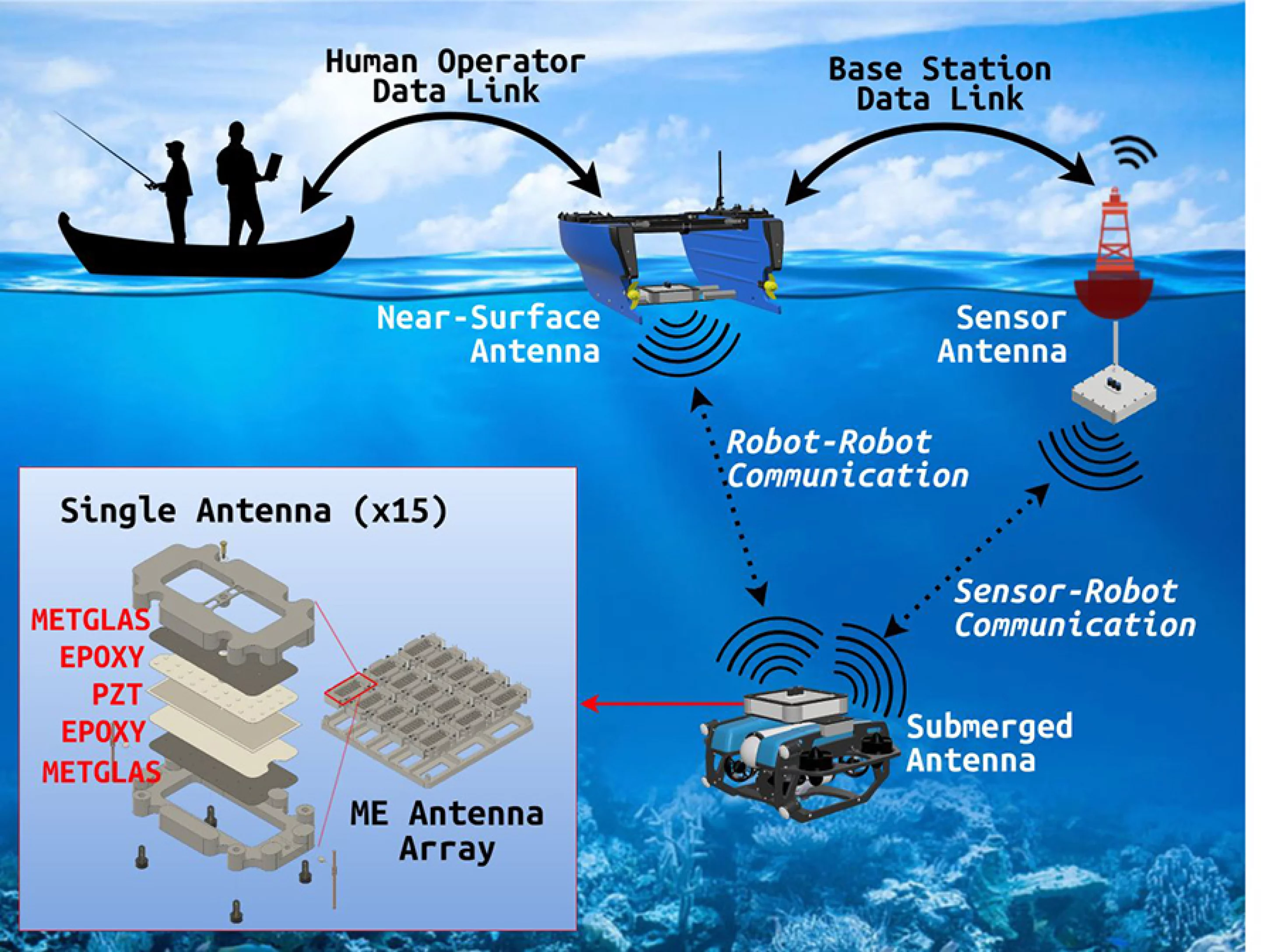
Het BlueME-systeem is ontworpen om deze knelpunten aan te pakken. Het systeem maakt gebruik van een magneto-elektrische (ME) antenne waarmee autonome onderwatervoertuigen (AUV's) datacommunicatie tot 730 meter kunnen bereiken terwijl ze slechts ongeveer 10 watt aan stroom verbruiken, wat minder is dan een huishoudelijke LED-lamp. Volgens het onderzoeksteam kan BlueME in een zoetwateromgeving stabiele communicatie handhaven op een afstand van 200 meter met slechts 1 watt aan vermogen, en in een zoutwateromgeving kan het signaaldetectie bereiken op 730 meter met minder dan 10 watt, en wordt het niet beïnvloed door watertroebelheid, obstakels of multipath-interferentie.
De kerninnovatie van dit systeem is het koppelen van magnetostrictieve materialen met piëzo-elektrische keramische materialen om een magneto-elektrische antenne te vormen. Concreet vervormt het externe magnetische veld de magnetostrictieve laag genaamd Metglas, en deze mechanische vervorming zorgt ervoor dat de aangrenzende PZT-piëzo-elektrische laag spanning genereert; de omgekeerde werking kan de signaalemissie voltooien. Dankzij dit elektromechanische koppelingsontwerp kan de antenne werken in de zeer lage frequentieband van ongeveer 35 tot 36 kHz, terwijl hij veel kleiner is dan traditionele elektrische antennes met dezelfde frequentie.
Het complete BlueME-systeem bestaat uit 15 van deze antennes in een 3x5-array, gehuisvest in een oliegecompenseerde waterdichte behuizing om de enorme hydrostatische druk in diepwateromgevingen te compenseren. Interessant genoeg ontdekten de onderzoekers dat de prestaties van deze magneto-elektrische antenne verbeterden nadat ze in het water waren terechtgekomen: bij 36 kHz was de signaalgolflengte ongeveer 8.327 meter in de lucht, maar werd deze gecomprimeerd tot ongeveer 170 meter in zoet water, waardoor de stralingsefficiëntie van de kleine antenne aanzienlijk verbeterde. De gezamenlijke transmissie van meerdere antennes versterkt het uitgestraalde vermogen ongeveer 225 keer vergeleken met dat van een enkele antenne. In combinatie met de bijpassende ontvangstarray kan de theoretische verbindingsversterking ongeveer 119 decibel bereiken.
Het project wordt gezamenlijk geleid door Adam Khalifa en Md Jahidul Islam, en de onderzoeksresultaten zijn geaccepteerd door IEEE Transactions on Ocean Engineering. Khalifa, die zich al lang bezighoudt met het ontwerpen van micro-draadloze implanteerbare apparaten, herinnerde zich dat hij op een dag plotseling de overeenkomsten in de fysieke eigenschappen van het menselijk lichaam en de oceaan besefte: "Onze lichamen zijn in wezen gemaakt van licht zout water, waardoor we op een heel andere manier over oceaancommunicatie gingen nadenken."
Tijdens de openwatertest voerde het team veldproeven uit bij Warburg Lake (zoetwater) in Gainesville, Florida, en de Florida Gulf Coast (zoutwater) om de prestaties van het systeem onder verschillende wateromstandigheden te verifiëren. Experimenten tonen aan dat BlueME een stabiele verbinding kan behouden, ongeacht de troebelheid van het waterlichaam of de aanwezigheid van obstakels of multipath-reflecties, wat van praktisch belang is voor onderwateroperaties in complexe offshore-omgevingen.
In termen van datasnelheden bereikt BlueME momenteel transmissiesnelheden van ongeveer 1 Kb/s tot 100 Kb/s, ruim onder de gigabitsnelheden die optische systemen onder ideale omstandigheden kunnen bereiken. Het onderzoeksteam benadrukte echter dat het ontwerpdoel van het systeem vanaf het begin niet was om een extreem hoge bandbreedte na te streven, maar om een laag stroomverbruik, lange afstanden, stabiliteit en een bidirectionele verbinding te bereiken met minder impact op het milieu. "Het is denkbaar dat de robot elke 10 minuten de voortgang van de taak aan je rapporteert, en dat de operator op basis daarvan de taak in realtime kan beoordelen en aanpassen, wat cruciaal genoeg is om de flexibiliteit van onderwateroperaties te verbeteren." Islam zei.
De auteur van het artikel wees erop dat dit de eerste keer is dat een magneto-elektrische antenne op praktisch niveau in een buitenomgeving wordt ingezet, en dat het ook een van de grootste VLF/LF magneto-elektrische antenne-arrays tot nu toe is. Het team heeft nu een voorlopige patentaanvraag ingediend en zoekt naar verdere financiering om de hardware te verbeteren en aanvullende reisproeven uit te voeren op een volledig autonoom onderwatervoertuigplatform. Verwachte toekomstige toepassingen omvatten belangrijke scenario's zoals collaboratieve formatienavigatie, het in kaart brengen van het terrein van de zeebodem en real-time positionering.
"We hebben de huidige resultaten bereikt met zeer beperkte initiële middelen." Khalifa benadrukte dat als er in de toekomst speciale technische investeringen kunnen worden gedaan en grootschalige implementatie kan worden bereikt, het potentieel van dit platform de momenteel gedemonstreerde mogelijkheden ruimschoots zal overtreffen. Islam beschreef de huidige fase als "een zeer vroege periode van een product met een groot potentieel", wat suggereert dat BlueME nog steeds een enorme verbeeldingskracht heeft op het gebied van toepassingen onder water en zelfs mariene robots.