Een team van de Rice University in de Verenigde Staten heeft onlangs een nieuw radarsysteem langs de weg gelanceerd, EyeDAR genaamd, dat naar verwachting autonome voertuigen zal voorzien van uitgebreide detectiemogelijkheden, vergelijkbaar met een 'derde oog'. Onderzoekers zeggen dat deze technologie de nauwkeurigheid van de omgevingswaarneming en de veiligheidsredundantie van autonome voertuigen aanzienlijk kan verbeteren door belangrijke verkeersinformatie terug te sturen naar het op het voertuig gemonteerde systeem via millimetergolfradarapparatuur die op de wegeninfrastructuur wordt ingezet.
Het bestaande autonome rijden is voornamelijk afhankelijk van de samenwerking van ingebouwde camera's, lidar (LiDAR) en traditionele radar: de camera is verantwoordelijk voor het identificeren van voetgangers, voertuigen en verkeersborden, en LiDAR gebruikt laserpulsen om een uiterst nauwkeurige driedimensionale puntenwolk te bouwen om de tekortkomingen van zicht en radar op het gebied van ruimtelijke dieptewaarneming te compenseren. Beide zijn echter gevoelig voor zwaar weer, zoals regen, sneeuw, nevel, enz. Radar bereikt doeldetectie die niet afhankelijk is van licht en weer, door radiogolven uit te zenden en te ontvangen. In de werkelijke wegomgeving reflecteren de gedetecteerde objecten echter vaak slechts een kleine hoeveelheid signalen en wordt een groot aantal radargolven verspreid, wat resulteert in onvolledige informatie die wordt ontvangen door de voertuigradar, waardoor het moeilijk wordt om potentiële risico's, zoals geblokkeerde of gedeeltelijk geblokkeerde voetgangers en voertuigen, tijdig nauwkeurig te identificeren.
Terwijl zelfrijdende vrachtwagens, bezorgrobots, enz. geleidelijk richting commercialisering evolueren, wordt de beperking van sensoren in het "niet helder of ver kunnen zien" in complexe wegomstandigheden steeds meer gezien als een veiligheidstekortkoming. Het team van Rice University probeert het waarnemingssysteem uit te breiden van voertuigen naar infrastructuur langs de weg, waarbij EyeDAR wordt gebruikt om blinde vlekken en informatielacunes op te vullen. Dit apparaat maakt gebruik van een millimetergolfradarontwerp met laag vermogen en kan worden geïnstalleerd op voorzieningen langs de weg, zoals verkeerslichten, verkeersborden en reclameborden. Het verzamelt de gereflecteerde golven die oorspronkelijk in de omgeving verspreid waren, transformeert ze in een completere beschrijving van omringende verkeersdeelnemers en zendt ze terug naar het boordradarsysteem van het voertuig.
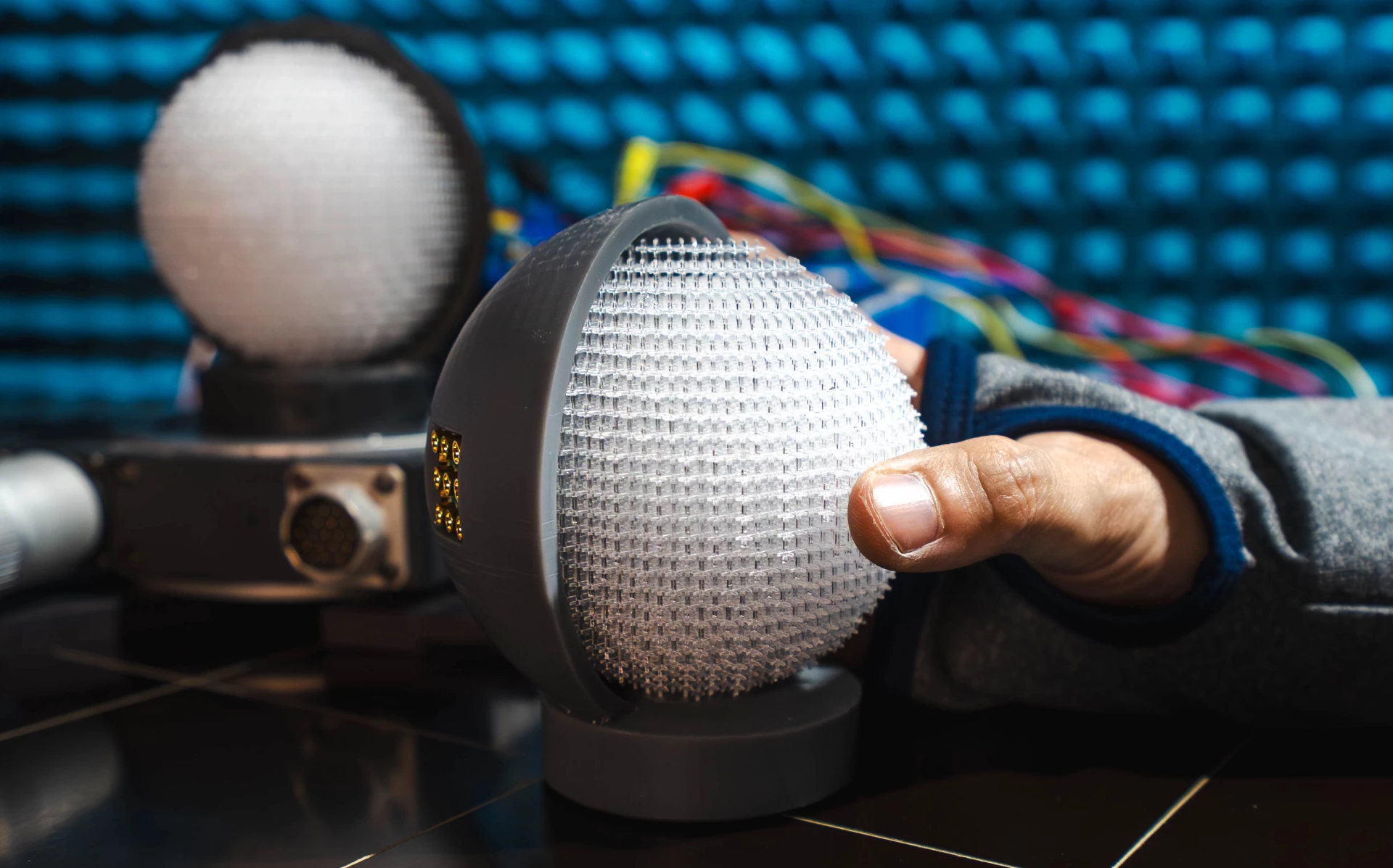
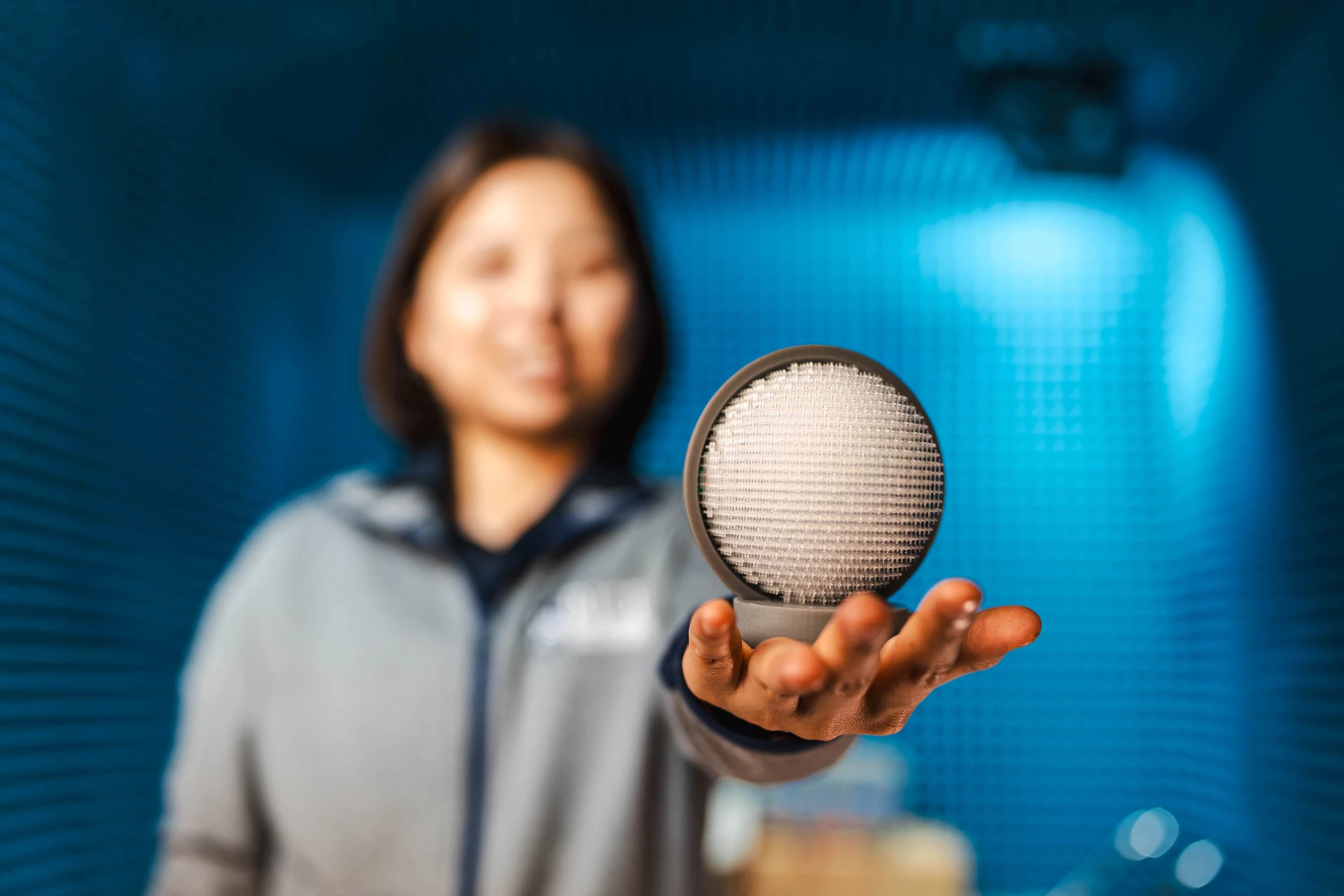
De kern van EyeDAR is een sensoreenheid ter grootte van een sinaasappel, bestaande uit twee delen die lijken op een "lens" en een "netvlies": de voorkant is een Luneburg-metamateriaallens gemaakt met behulp van 3D-printtechnologie, die wordt gebruikt om radiosignalen nauwkeurig te focusseren vanuit verschillende richtingen naar een vaste focus; gevolgd door een rij dicht bij elkaar geplaatste antenne-arrays, die verantwoordelijk zijn voor het ontvangen en analyseren van de ruimtelijke informatie van deze gefocuste signalen, en deze vervolgens terugsturen naar het autoradarsysteem. In tegenstelling tot traditionele radaroplossingen die grootschalige antenne-arrays en complexe digitale berekeningen vereisen om de bundelvorming en signaalverwerking te voltooien, vertrouwt EyeDAR op de fysieke structuur van de lens zelf om een grote hoeveelheid "voorbewerking" te voltooien, waardoor de last voor elektronische hardware en algoritmen aanzienlijk wordt vereenvoudigd.
Volgens het onderzoeksteam bestaat deze lens uit meer dan 8.000 kleine eenheden met verschillende vormen en brekingsindexen. De positie en parameters van elke eenheid zijn zorgvuldig ontworpen, zodat het totale materiaal op een specifieke manier kan buigen en focussen wanneer er elektromagnetische golven doorheen gaan. Het is in wezen een "hardware-hardware" analoge signaalprocessor. Door deze metamateriaalstructuur kan EyeDAR de voorberekening van ruimtelijke informatie tijdens het transmissieproces "onmiddellijk" voltooien met de snelheid van het licht, waardoor de noodzaak van een grote hoeveelheid tijdrovende en energieverslindende digitale verwerking in traditionele radar wordt geëlimineerd. Experimentele resultaten tonen aan dat het systeem doelrichtingen meer dan 200 keer sneller kan bepalen dan traditionele radar, wat wordt beschouwd als een aanzienlijke prestatiesprong in analoge verwerking vergeleken met digitale verwerking.

In tegenstelling tot conventionele wegkantradar of actieve zendapparatuur genereert EyeDAR zelf geen nieuwe elektromagnetische golven. In plaats daarvan concentreert het zich op het verzamelen van de "resterende" echo's die naar buiten worden verspreid nadat het voertuig het doel heeft gedetecteerd, deze vervolgens filtert en reconstrueert en het "opgeschoonde" signaal terugkaatst naar de op het voertuig gemonteerde radar. Onderzoekers zijn van mening dat dit ontwerp, dat compact en goedkoop is, een eenvoudige architectuur heeft en afhankelijk is van ultrasnelle simulatieverwerking, naar verwachting grootschalige aanleg langs stedelijke wegen en snelwegen zal ondersteunen, waardoor een infrastructuurnetwerk wordt gevormd dat de ‘verre visie’ en ‘perspectief’ van autonome voertuigen dient.
Productie-expert Emeka Moronu blijft echter voorzichtig over de vraag of het plan daadwerkelijk kan worden uitgevoerd. Hij wees erop dat, hoewel de theoretische modellen en experimentele gegevens opwindend zijn, het een zeer uitdagende technische taak is om duizenden microstructurele eenheden gedurende lange tijd stabiel te repliceren in de daadwerkelijke productie en ervoor te zorgen dat ze de geometrische nauwkeurigheid en prestaties behouden in extreme buitenomgevingen, zoals blootstelling aan hoge temperaturen en ernstige kou en vorst. Dit zou ook een van de grootste drempels kunnen worden voor EyeDAR om het laboratorium te verlaten en richting grootschalige inzet te gaan.
Ondanks de onzekerheid rond de vooruitzichten, is het team van Rice University van mening dat EyeDAR het potentieel aantoont van metamateriaalradar langs de weg voor autonome rijveiligheid. Eenmaal op grote schaal ingezet, kunnen voertuigen op deze ‘ogen langs de weg’ vertrouwen om informatie over de toestand van de weg te verkrijgen die buiten het detectiebereik van hun eigen sensoren ligt, en verkeersdeelnemers om hoeken en voetgangers of voertuigen die door grote obstakels worden verborgen vroegtijdig te detecteren, waardoor de veiligheidsredundantie van het algehele transportsysteem wordt verbeterd. Onderzoekers voorspellen ook dat deze technologie in de toekomst ook kan worden uitgebreid naar toepassingsscenario's zoals drones, robots en beveiligingsmonitoring, waardoor een betrouwbaardere ondersteuning van de omgevingsperceptie wordt geboden voor een verscheidenheid aan autonome systemen.