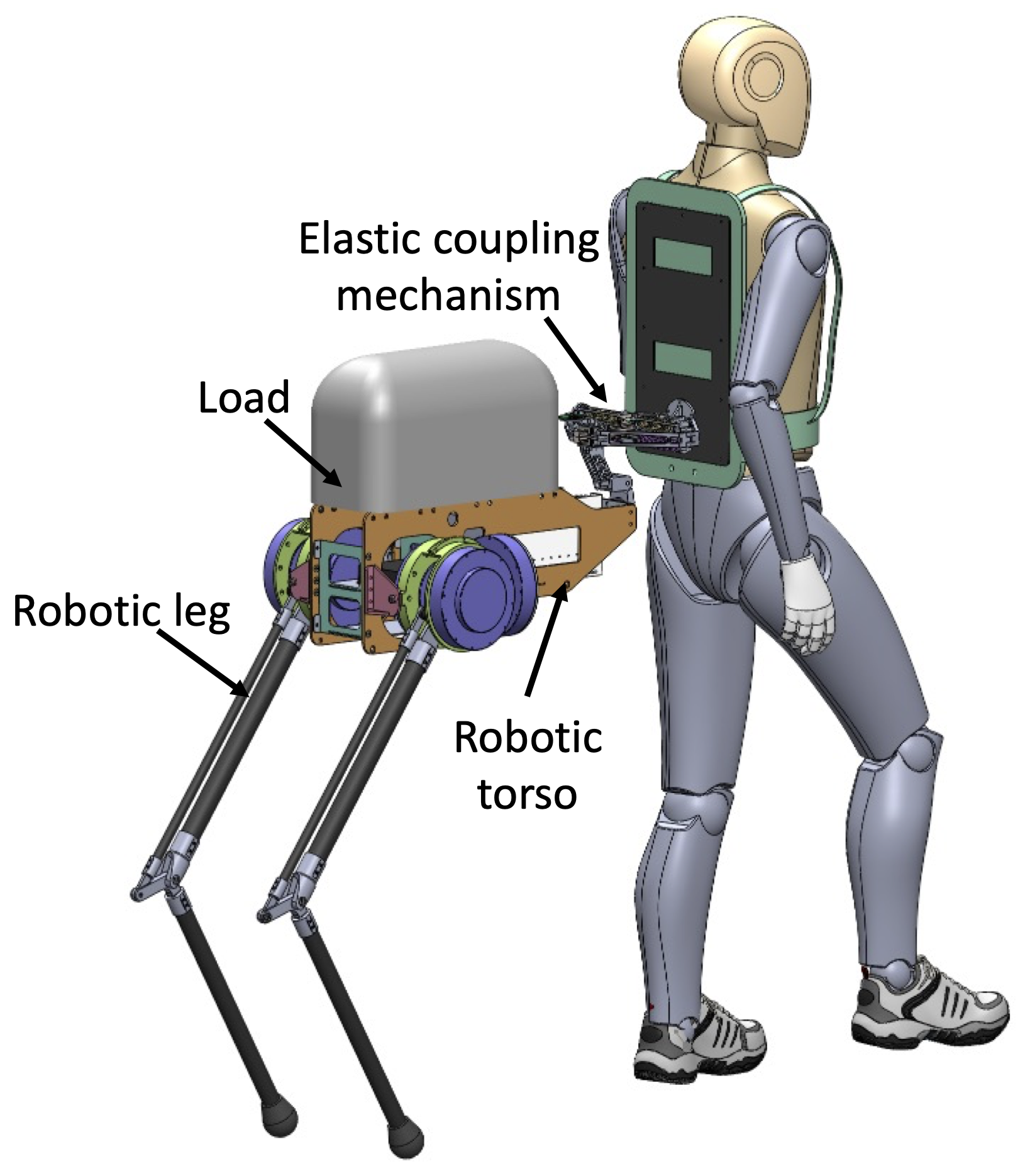
Het team van professor Fu Chenglong van de Southern University of Science and Technology ontwikkelde oorspronkelijk een draagbare centaur-dragende looprobot. De relevante resultaten zijn gepubliceerd in gezaghebbende tijdschriften op het gebied van robotica. Traditionele exoskeletrobots hebben een lage ondersteuningsefficiëntie en kunnen de menselijke stofwisseling slechts met ongeveer 10% verminderen.De Centaur-robot doorbreekt het traditionele ontwerp en haalt inspiratie uit de dragende vorm van viervoeters. Als onafhankelijke ledematen is het verbonden met de menselijke rug via een draagbare elastische koppelingsinterface om een mens-machine hybride viervoetersysteem te bouwen.
De robot is uitgerust met een verzacht elastisch koppelmechanisme, dat niet-lineaire stijfheidskenmerken heeft en een dynamische ontkoppeling van krachtondersteuning en balans realiseert; gecombineerd met het samenwerkingscontroleframework voor loopinteractie,Het kan de bewegingsintentie van het menselijk lichaam in realtime waarnemen, deze met hoge precisie in alle richtingen volgen zonder handmatige instructies, en tegelijkertijd een stabiele horizontale stuwkracht uitvoeren.
Uit experimentele verificatie blijkt dat de robot uitstekende prestaties levert. In termen van manoeuvreerbaarheid kan hij de "8"-figuurcirkel rond de stapel voltooien in een smalle ruimte van 1 meter, en soepel over complexe wegoppervlakken zoals trappen en hellingen gaan.
Wat de gewichtdragende prestaties betreft,Bij het dragen van een gewicht van 20 kg worden de netto metabolische kosten van het menselijk lichaam met 35% verlaagd en wordt de druk op de voetzolen met 52% verminderd.Er is geen significant verschil tussen stabiliteit en lopen zonder last.
Deze robot is geschikt voor noodhulp, veldverkenning, logistieke ondersteuning van complexe terreinen en andere scenario's, en zal naar verwachting in de toekomst de fysiologische grenzen van het menselijk lichaam doorbreken.