Een onderzoeksteam van de West Virginia University in de Verenigde Staten heeft onlangs een zachte maar krachtige zachte robothand ontwikkeld die niet alleen kwetsbaar fruit en groenten zoals aardbeien voorzichtig kan plukken, maar ook de rijpheid uitgebreid kan beoordelen door middel van aanraking en zicht tijdens het plukproces, wat naar verwachting de arbeidskosten en de verspilling tijdens het plukproces aanzienlijk zal verminderen.
Volgens rapporten wordt de landbouw een van de industrieën die steeds meer door robottechnologie wordt getroffen. Boeren in veel regio’s over de hele wereld worden geconfronteerd met de dubbele druk van tekorten aan arbeidskrachten en stijgende arbeidskosten. Bij sommige gewassen bedragen de handmatige plukkosten zelfs bijna de helft van de totale productiekosten. Voor groenten en fruit met extreem korte plukvensters die gemakkelijk beschadigd raken, zoals aardbeien, frambozen en avocado's, is het vaak moeilijk om de efficiëntie en het verlies in evenwicht te brengen met traditioneel handmatig of streng mechanisch plukken. Als gevolg hiervan kunnen boeren tot een kwart van hun opbrengst verliezen.
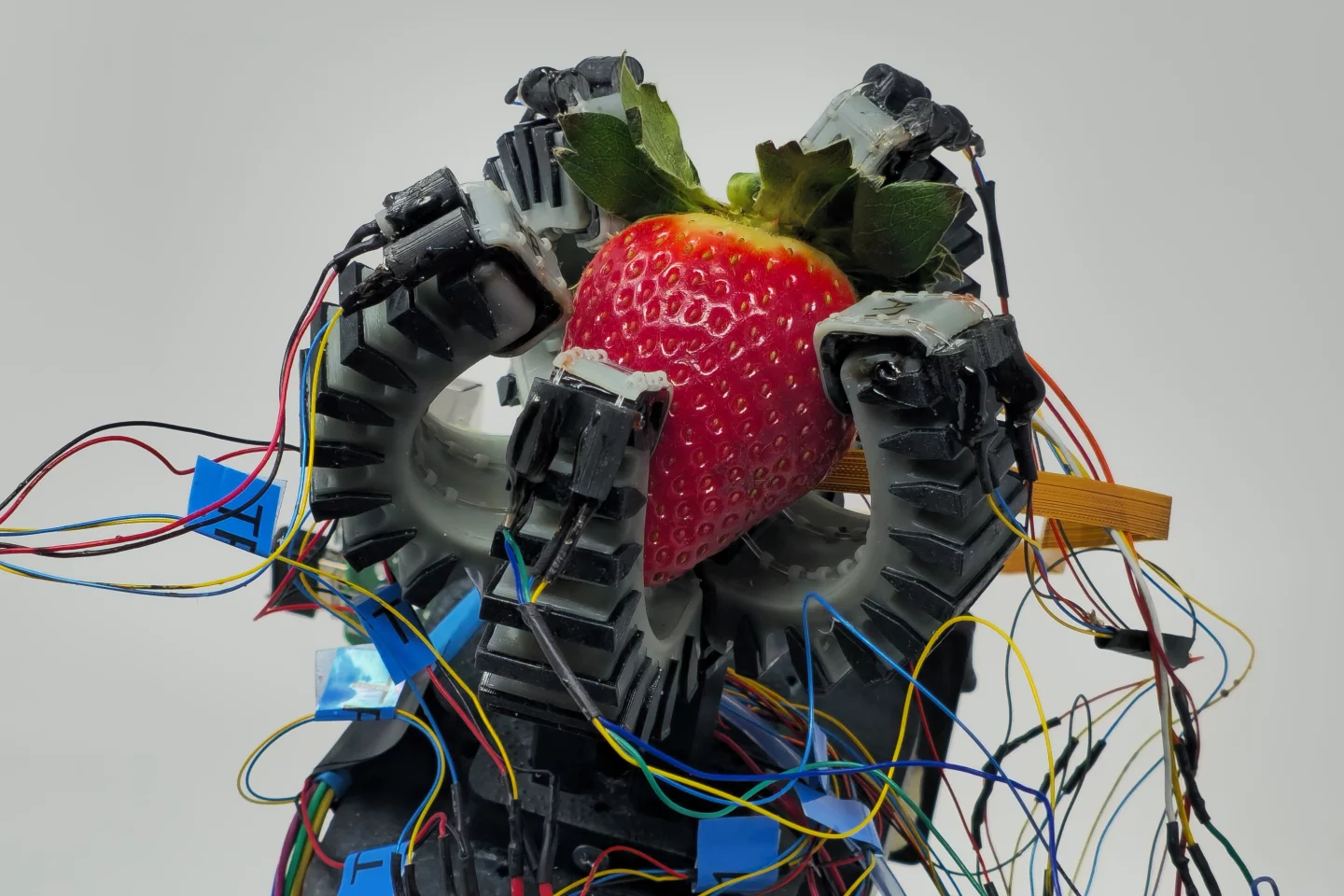
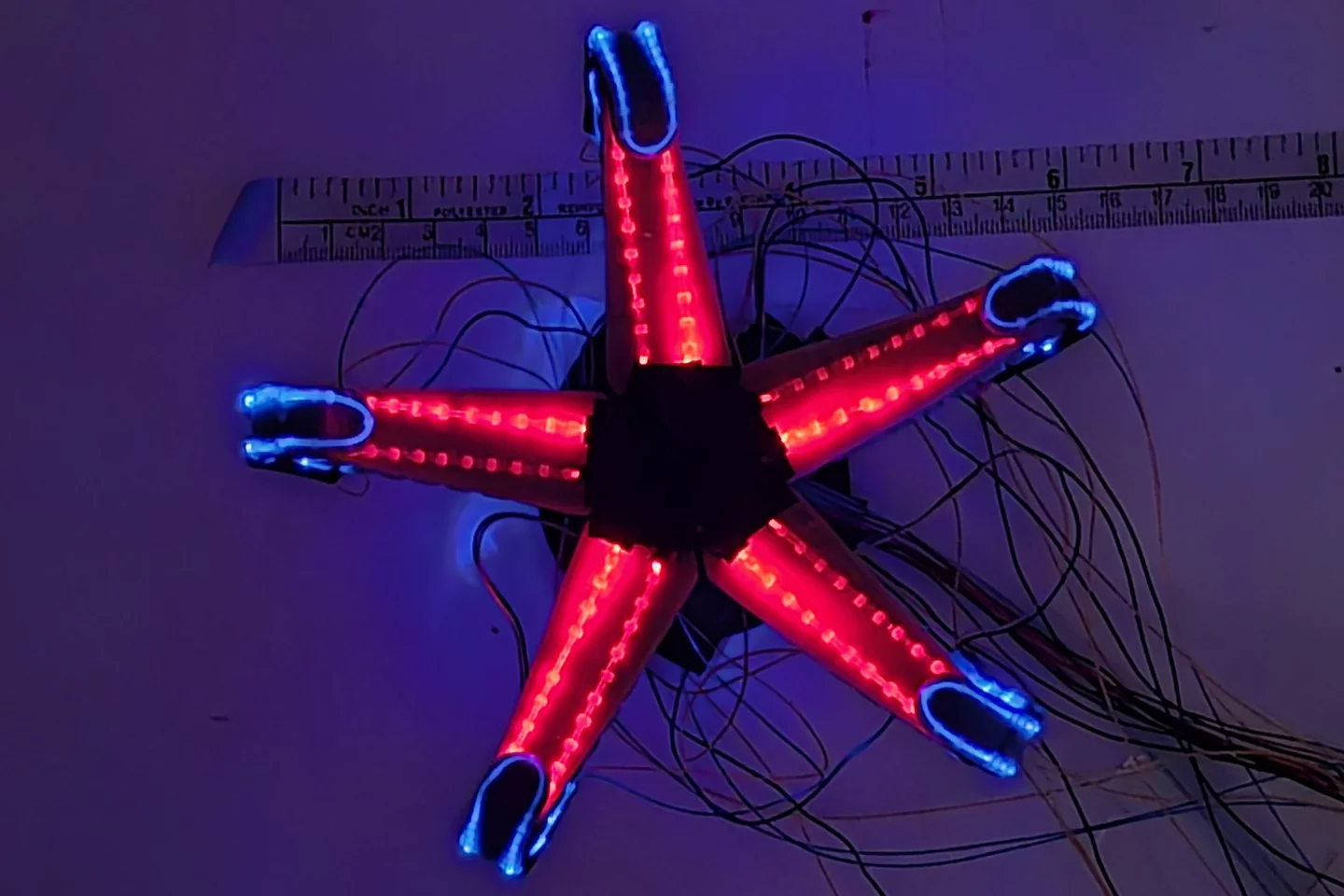
Het team van het "Robiotics Lab" van de West Virginia University heeft gewerkt aan de ontwikkeling van robots die de beweging van dieren imiteren. De zachte robothand die deze keer wordt gelanceerd, is niet de metalen ‘mechanische klauw’ waar mensen aan denken. In plaats daarvan haalt het inspiratie uit de anatomie van zeesterren en gebruikt het siliconen- en polyurethaanmaterialen om zachte vingers te maken. Tegelijkertijd behoudt de algehele vorm nog steeds een lay-out met vijf vingers, vergelijkbaar met die van een menselijke hand, zodat deze op een natuurlijkere manier fruit kan oppakken en vasthouden.
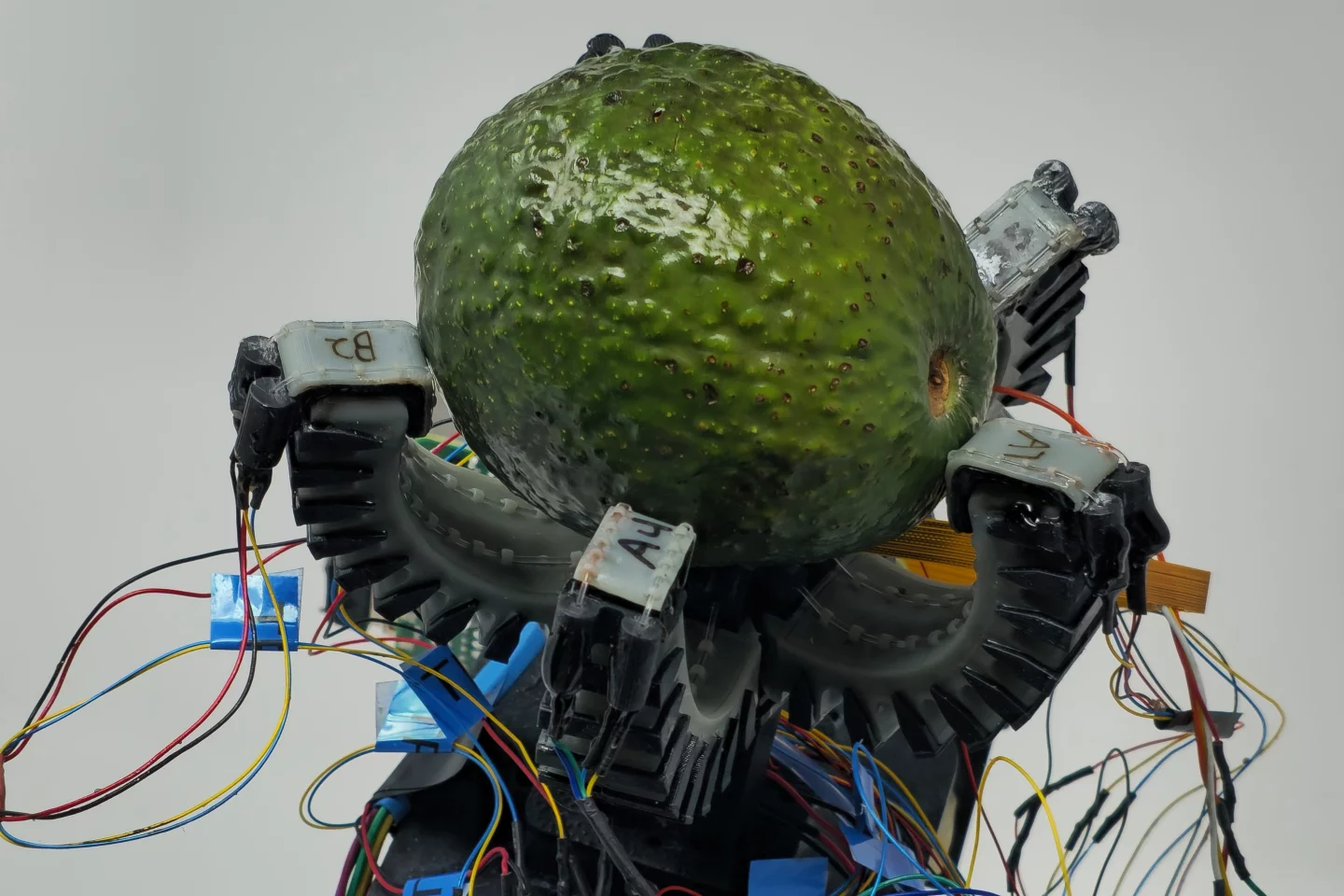
Qua waarnemingsvermogen is deze nieuwe robothand uitgerust met een miniatuurcamera voor visuele beoordeling van het uiterlijk van fruit. Deze functie is op sommige landbouwrobots toegepast. De onderzoekers wezen er echter op dat alleen vertrouwen op het uiterlijk niet voldoende is om de rijpheid nauwkeurig te beoordelen. Als we avocado's als voorbeeld nemen, moet hun rijpheid vaak worden gevoeld door zachtjes te knijpen. Hoe je de robot dit ‘menselijk intuïtieve’ oordeel kunt laten leren, is een van de belangrijkste problemen in dit onderzoek.
Om dit probleem op te lossen heeft het onderzoeksteam speciale tactiele sensoren in de zachte vingers ingebed, zodat de robot, wanneer hij zachtjes in het fruit knijpt, fysieke informatie over de hardheid en elasticiteit kan verkrijgen zonder het fruit te pletten. Deze sensoren kunnen ook de houdkracht in realtime monitoren. Wanneer het systeem vaststelt dat de huidige grip niet stevig genoeg is, zal de robot de kracht automatisch afstemmen om te voorkomen dat het fruit wegglijdt of op de grond valt.
Tijdens de testfase toonde de robothand een hoge waarnemings- en regelnauwkeurigheid, en kon de sensor de vorm van het gegrepen fruit met bijna 100% nauwkeurigheid voorspellen. Het huidige prototype weegt minder dan 65 gram, heeft minder dan twee seconden nodig om één keer te openen en te sluiten, en kan een maximaal voorwerp van ongeveer 1 kilogram optillen, wat de basisvoorwaarden biedt voor lichtgewicht en reactiesnelheid voor daadwerkelijke integratie van landbouwmachines.
Projectleider Anand Mishra, assistent-professor bij de afdeling Werktuigbouwkunde, Materialen en Luchtvaart- en Ruimtevaarttechniek, zei dat het team van plan is deze softwaregrijptechnologie in de komende twee tot vier jaar op de wereldmarkt te brengen en werkt aan de ontwikkeling van een schaalbaarder grijpapparaat om te voldoen aan de behoeften van grootschalige inzet in het veld. Onderzoekers zijn ook optimistisch over de toepassingsmogelijkheden van deze technologie in een breder scala aan scenario's, waaronder het grijpen van vreemde objecten tijdens ruimtemissies, verkenning van de onderwateromgeving en de veilige werking van kwetsbare weefsels en organen in de medische zorg.

Relevante onderzoeksartikelen zijn gepubliceerd in het tijdschrift "Nature Communications", waaruit blijkt dat robotgrijpoplossingen die softwarestructuren, optische vezeldetectie en vision-systemen combineren een belangrijk technisch pad aan het worden zijn voor scenario's met veel verlies en hoge precisie. De onderzoekers wezen erop dat naarmate dergelijke zachte robots geleidelijk richting commercialisering evolueren, de verhouding tussen menselijke druk en fruit- en groenteverspilling op de frontlinie van de pluk op de boerderij naar verwachting aanzienlijk zal worden verbeterd, wat een nieuwe basis zal vormen voor de ontwikkeling van precisielandbouw en intelligente landbouwmachines.